早いもので、もう2015年も終わろうとしている。
今年はいろいろなことがあった。
上半期は
・fonのカスタムファーム導入に挑戦
・ラズベリーパイで遊ぶ
私生活では家を購入し、かなりドタバタした。
下半期は
・統計とかDBとか少しずつ勉強
・タスク管理qdPMを導入したけど、なじまず
・外部から自宅サーバーへの接続環境を構築
・Markdownエディタを少し作った
・投資は目標クリア! 来年も頑張ろう
なんだかんだ仕事が忙しくて、なかなか時間が取れなかった。
でも、なんとか時間を確保して少しずつ前進できたと思う。
来年は、家庭も仕事も充実するといいな。
ブログ的には
・Electon(NW.jsもか)を使った開発
・PICマイコンを使った開発をもっと行う
・投資も頑張る
かな。
挑戦し続けたい。ぼんやりばかりはしていられない。
「失敗したところでやめてしまうから失敗になる
成功するところまで続ければ、それは成功になる」
2015年12月30日水曜日
2015年10月25日日曜日
簡易Markdownエディタにmermaid.jsを導入してフローチャートを表示する
しばらくバタバタしており、更新が滞ってしまった。
でも続けることはやめてはいない。
最近、Markdownが気になる。流行に乗り遅れてしまった感があるけど、
このページを見て心踊ったからだ。
http://qiita.com/uzuki_aoba/items/a01f8b0b52ced69c8092
ここで紹介されている「Haroopad」は良さそうなのだけど、
こればかりに頼ってしまうのもなんだかなので、
勉強を兼ねてwebベースの簡易エディタを作ってみたいと思う。
リアルタイム更新
Markdown表記
コードのハイライト表示
mermaid.js対応
これだけ[npm install jquery]
2.Markdownパーサー(marked)
これだけ [npm install marked]
3.ハイライト(highlight.js)
これだけ[npm install highlightjs]
4.Mermaid.js
これだけ[npm install mermaid --save-dev]
※phpにしたのは、phpの簡易サーバーで動作確認したかったから
他意はない。
2.[mde.js]
すると
あ、フローチャートって書いたけど、シーケンス図だ…Orz


http://qiita.com/opengl-8080/items/56b4b6a9d31bac0cb3e2
http://clmpractice.org/2015/05/21/rational-team-concert-open-social-widget-with-mermaid-markdown/
knsv.github.io/mermaid/
http://knsv.github.io/mermaid/usage.html
http://kannokanno.hatenablog.com/entry/2013/06/19/132042
http://qiita.com/amay077/items/704d48130e5cf17e8654
でも続けることはやめてはいない。
最近、Markdownが気になる。流行に乗り遅れてしまった感があるけど、
このページを見て心踊ったからだ。
http://qiita.com/uzuki_aoba/items/a01f8b0b52ced69c8092
ここで紹介されている「Haroopad」は良さそうなのだけど、
こればかりに頼ってしまうのもなんだかなので、
勉強を兼ねてwebベースの簡易エディタを作ってみたいと思う。
概要
webベースリアルタイム更新
Markdown表記
コードのハイライト表示
mermaid.js対応
準備
ディレクトリ作成
今回はmdeとした。インストール
1.jQueryこれだけ[npm install jquery]
2.Markdownパーサー(marked)
これだけ [npm install marked]
3.ハイライト(highlight.js)
これだけ[npm install highlightjs]
4.Mermaid.js
これだけ[npm install mermaid --save-dev]
プログラム
1.[mde.php]※phpにしたのは、phpの簡易サーバーで動作確認したかったから
他意はない。
2.[mde.js]
動かし方
作成した ディレクトリで[php -S 127.0.0.1:8080]とするすると
あ、フローチャートって書いたけど、シーケンス図だ…Orz


参考
以下のリンクがものすごく参考になった。http://qiita.com/opengl-8080/items/56b4b6a9d31bac0cb3e2
http://clmpractice.org/2015/05/21/rational-team-concert-open-social-widget-with-mermaid-markdown/
knsv.github.io/mermaid/
http://knsv.github.io/mermaid/usage.html
http://kannokanno.hatenablog.com/entry/2013/06/19/132042
http://qiita.com/amay077/items/704d48130e5cf17e8654
雑感
Qiitaにすこし憧れる2015年5月9日土曜日
FON2405EのGPIOでキャラクタ液晶を制御する(WEB制御)
目的
前回、送達確認を拡張して受信機能(PICマイコンからFONに対してコマンドを出せる)ようにした。今回は、コマンドラインの操作をWEBから行えるように変更した。
概要
WEBからクリア、行移動、文字出力を行う。PICからの受信は次回の課題。


結果
FON2405EのGPIOでキャラクタ液晶を制御する(受信機能追加2)
目的
前回、受信機能を追加したが、1Byteのみだった。今回は、複数Byteの受信を拡張した。
結果
前回同様に1秒毎に顔文字「Adeno(^o^)mm-ss」※mm-ssは分-秒を送信し続けると、400回のコマンド送信に対して、送信NGは52回 13%くらい
なんか前よりも増えた気がする…。
受信の方は、PICから「Hello!!」を送信。100回中NGは5回 5%くらいか
こっちはこんなもんか??
これで、双方向の複数バイトデータを扱えるようになった。
ようやくここまで来た。
ラズベリーパイでも良いのだけれど、ちょっと高い。
このFONならば、中古だけど、ACアダプタと本体で 500円〜なので、
心置きなく遊び倒せる。
何をやったか
電文

2015年4月25日土曜日
FON2405EのGPIOでキャラクタ液晶を制御する(受信機能追加)
目的
前回、チェックサムと送達確認(PICマイコンからFONに対して応答)を行うようにした。今回は、送達確認を拡張して受信機能(PICマイコンからFONに対してコマンドを出せる)ようにした。
概要
チェックサムOKの場合に、FONに対してACKを送信する。シリアル通信のクロックはFON側で生成しているので、
イメージとしてはSPI通信に近いと思う。
結果
前回同様に1秒毎に顔文字「Adeno(^o^)mm-ss」※mm-ssは分-秒を送信し続けると、400回のコマンド送信に対して、送信NGは15回
80回のときは、2回 2〜3%くらい?
結果は地味だけど、PIC→FON方向の通信ができるようになったのは大きい
何をやったか
・フォーマット1.データを送信するとき
種類 方向
クロック FON→PIC 385us
送信データ [STX][チェックサム][DATA][ETX]
受信データPIC→FON 1byte前に対する受信結果
2.送信結果を確認するとき
種類 方向
クロック FON→PIC 385us
送信データ [ENQ]
受信データPIC→FON 1byte前に対する受信結果
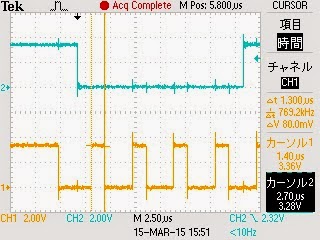
黄色・・・クロック
水色・・・受信データ(PIC→FON)この場合はACK(0x06)

------------------------------------------------
gpio_write_sr Start:CLK=12 DATA_OUT=11 DATA_IN=14
Send:[STX][CHKSUM = 14][DATA][ETX]<-4ms->[ENQ]
Input = 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6
RcvChk = OK
Total Time = 307ms
------------------------------------------------
・FON側
・PIC側
受信処理の後、に送信したいものを出力するだけ
↓受信処理
sr_buf = ((sr_buf<<1) & 0xFE) | (0x01 & DATA_PORT);
↓送信処理
//DATA 出力
if((sr_out & sr_out_mask) == 0){
DATA_OUT_PORT = 0;
}else{
DATA_OUT_PORT = 1;
}
sr_out_mask = sr_out_mask >> 1;
・エラー発生回数測定用スクリプト
今日はここまで、次回は、PICからなにかデータを送信させてみるか
2015年4月19日日曜日
FON2405EのGPIOでキャラクタ液晶を制御する(チェックサム追加)
目的
前回、なんとかFON2045E(RT3050)のGPIOを使って、キャラクタ液晶の制御を行ったが、受信が失敗してしまう場合があった。そこで、チェックサムと到達確認(PICマイコンからFONに対して応答)を行うようにした。
結果
チェックサムの導入によって、受信失敗したものは、破棄できるようになった。1秒毎に顔文字「Adeno(^o^)mm-ss」※mm-ssは分-秒
を送信し続けると、おおよそ1分に2回程度チャックサムエラーが発生している模様。

何をやったか
1.チェックサムの導入送信するデータを以下のように変更
[STX][チェックサム][DATA][ETX]
STX : 02h
チェックサム:DATA部の合計値を0〜15(下位4ビット分)
DATA :今まで送っていたデータ
ETX :03h
2.受信の追加
送信後に、readしているだけ
PICからの戻りは画面に表示しているだけだけど、
今後は、再送とか実装していきたい。
2015年4月13日月曜日
WAPM-HP-AM54G54を入手
はじまり
近所のリサイクルショップで見慣れない形状の無線LANAPを発見。業務用らしい。アンテナがなくて、500円。
別に無線を出したいわけでは無いので、これでもOKです。
どんなものか
外観はこんな感じ。ぼろぼろ(笑)

赤丸のところにUARTがあるようだ。
miniPCI×2とか富豪だね。他のカードに変えたら面白いかな。
PoE対応なので、それで遊ぶのも面白いかも。
今後の目標
もちろんOpenWrt化2015年4月5日日曜日
FON2405EのGPIOでキャラクタ液晶を制御する(高速化)
目的
先週、FON2045E(RT3050)のGPIOを使って、キャラクタ液晶の制御を行ったが、1行(16文字)表示するのに、1.6秒かかってしまっていた。
今回これの高速化を目指す。
受信側(PIC)の高速化によって改善できないかを実験。
結果
1.6秒→0.5秒にまで短縮することができた。
何をやったか
FON側・・・クロック生成をusleep(4ms)からビジータイマー1460μsに変更
PIC側・・・1ms周期の割り込みによるデータサンプリングを480usに変更
デバック出力としてのUART出力をエラー時のみに変更
● クロック生成の変更
GPIOの制御に1.4μs要するので、これを1000回繰り返しただけ。
それで1460μs消費させる。
●割り込み間隔の変更
480μs もう少し攻めても大丈夫な気がするけど、余裕をみて。
PICは4MHzで動作しているので、1サイクルあたり1μs。
割り込み間隔100μsくらいでも 行けそうな気がする。
2015年3月30日月曜日
FON2405EのGPIOでキャラクタ液晶を制御する
先週からGPIOの出力が一部間延びしてしまうことで、行き詰っていた。
気分を変えて、同期シリアル通信でキャラクタ液晶を制御したいと考えた。
結論から書くと、以下の2点の課題から、表示速度はすこぶる遅い。
1.仲介役のPICマイコンの動作速度は4MHz(内臓のオシレーターを使ったため)
2.やっぱりGPIO出力が間延びするから1クロック4msのディレーを入れた
16文字のデータを送るのに、現状1.3秒かかる。
いざまとめるとこんなものなのだけど、なかなか時間がかかったし、
間延び問題が気になる・・・。
ハード
FON2405EのGPIO---CLK,DATA---PICマイコン---キャラクタ液晶

ソフト
1.gpioのドライバ
2.gpioのアプリ
3.PICマイコンのファーム
1.gpioのドライバ
標準のものから変更なし
RALINK_GPIO_WRITE_BYTEを使用。
今までの試行錯誤は何だったんだ・・・・。
2.gpioのアプリ
変更点
オプション[s]を追加
s <gpio clk> <gpio data> <delaytime> <char>
これを指定するとgptio_test_write_srを呼ぶようにした。
usleepを使うと4ms以下にはならないようだし、
ドライバの方で、udelayを使って短くしても、
前回の間延び問題のように不安定になってしまう。
なので、CLKの変化のタイミングだけusleepを使って、
DATAのセット部分はディレーなしにした。
多少は速くなった。
3.PICマイコンのファーム
変更点
1ms毎にタイマー割り込みを行って、
CLKがH→L(立ち下がり)のタイミングを探す。
更に1ms経過してもLの状態だったら、DATAを読み込む。
main.c
rcv_lib.c
気分を変えて、同期シリアル通信でキャラクタ液晶を制御したいと考えた。
結論から書くと、以下の2点の課題から、表示速度はすこぶる遅い。
1.仲介役のPICマイコンの動作速度は4MHz(内臓のオシレーターを使ったため)
2.やっぱりGPIO出力が間延びするから1クロック4msのディレーを入れた
16文字のデータを送るのに、現状1.3秒かかる。
いざまとめるとこんなものなのだけど、なかなか時間がかかったし、
間延び問題が気になる・・・。
ハード
FON2405EのGPIO---CLK,DATA---PICマイコン---キャラクタ液晶
ソフト
1.gpioのドライバ
2.gpioのアプリ
3.PICマイコンのファーム
1.gpioのドライバ
標準のものから変更なし
RALINK_GPIO_WRITE_BYTEを使用。
今までの試行錯誤は何だったんだ・・・・。
2.gpioのアプリ
変更点
オプション[s]を追加
s <gpio clk> <gpio data> <delaytime> <char>
これを指定するとgptio_test_write_srを呼ぶようにした。
usleepを使うと4ms以下にはならないようだし、
ドライバの方で、udelayを使って短くしても、
前回の間延び問題のように不安定になってしまう。
なので、CLKの変化のタイミングだけusleepを使って、
DATAのセット部分はディレーなしにした。
多少は速くなった。
3.PICマイコンのファーム
変更点
1ms毎にタイマー割り込みを行って、
CLKがH→L(立ち下がり)のタイミングを探す。
更に1ms経過してもLの状態だったら、DATAを読み込む。
main.c
rcv_lib.c
2015年3月23日月曜日
FON2405EのGPIOでなんちゃってシリアル通信
GPIOの制御が少しわかってきたので、
前回、同期シリアル通信の下準備を行った。
汎用性とか考えると、やっぱりUART(調歩シリアル通信)をやってみたくなり、
ドライバ部分を書き換えてみた。
実験なので、通信速度は9600bpsで、パリティなし、ストップビットは1ビットとした。
やっていることは、結構単純で、1クロック分=1^6μs ÷9600=104μs分ごとにデータを出力するというもの。
http://www5b.biglobe.ne.jp/~kouta_y/news/newsvb/vb14.html
まず、比較のためにFT232RLにて'a'の1文字を送信した場合
 調べたとおり、104μsになっていた。
調べたとおり、104μsになっていた。
これを目指して、作ってみよう。
linux-2.6.21.x/drivers/char/ralink_gpio.cに追記
80行目付近にある[int ralink_gpio_ioctl]のcase文に
case RALINK_GPIO_UART_SEND:
base_delay = 104;
c = (unsigned char)(arg & 0xFFl);
if (0L <= idx && idx < RALINK_GPIO_DATA_LEN) {
tmp =le32_to_cpu(*(volatile u32 *)(RALINK_REG_PIODATA));
//H
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
//start_bit(L)
tmp2 = tmp & ~(1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
//data loop
for(i=0; i<8; i++){
if((c & mask) > 0){
//h
tmp2 = tmp | (1L << idx);
}else{
//l
tmp2 = tmp & ~(1L << idx);
}
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
mask = mask <<1;
}
//stop bit
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
}else
return -EINVAL;
break;
この結果が以下の通り
 まぁなんとかそれっぽいものがでてきた。
まぁなんとかそれっぽいものがでてきた。
いざ受信させて見ると、10回に1回くらい取りこぼしてしまう。
(成功の場合)

(失敗の場合)

データの中間くらいが間延びしているように見える・・・。
なーぜーー
前回、同期シリアル通信の下準備を行った。
汎用性とか考えると、やっぱりUART(調歩シリアル通信)をやってみたくなり、
ドライバ部分を書き換えてみた。
実験なので、通信速度は9600bpsで、パリティなし、ストップビットは1ビットとした。
やっていることは、結構単純で、1クロック分=1^6μs ÷9600=104μs分ごとにデータを出力するというもの。
http://www5b.biglobe.ne.jp/~kouta_y/news/newsvb/vb14.html
まず、比較のためにFT232RLにて'a'の1文字を送信した場合
これを目指して、作ってみよう。
linux-2.6.21.x/drivers/char/ralink_gpio.cに追記
80行目付近にある[int ralink_gpio_ioctl]のcase文に
case RALINK_GPIO_UART_SEND:
base_delay = 104;
c = (unsigned char)(arg & 0xFFl);
if (0L <= idx && idx < RALINK_GPIO_DATA_LEN) {
tmp =le32_to_cpu(*(volatile u32 *)(RALINK_REG_PIODATA));
//H
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
//start_bit(L)
tmp2 = tmp & ~(1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
//data loop
for(i=0; i<8; i++){
if((c & mask) > 0){
//h
tmp2 = tmp | (1L << idx);
}else{
//l
tmp2 = tmp & ~(1L << idx);
}
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
mask = mask <<1;
}
//stop bit
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
}else
return -EINVAL;
break;
この結果が以下の通り
いざ受信させて見ると、10回に1回くらい取りこぼしてしまう。
(成功の場合)
(失敗の場合)
データの中間くらいが間延びしているように見える・・・。
なーぜーー
2015年3月15日日曜日
FON2405EのGPIOの速度(かなり改善)
昨日すこし改善できたGPIOの速度。
もう少し何とかならないかと、探していたら
こんなHPを発見
http://d.hatena.ne.jp/naoya/20080122/1200960926
http://proger.blog10.fc2.com/blog-entry-64.html
なるほど合点です。4msより早くならない理由はusleepが原因でしたか。
早速、usleepを削除してみると、4msが1.3μsになりました!!
つまり1周期2.6μsだから384KHz
なので、8bit分送るのには18.4μs!
ざっくり16文字×2行の液晶に表示する場合は、 588μsこれなら全く問題にならないね!

ちなみに、ドライバー部分で無理やりループした場合は、
 1周期が400nsなので2.5MHz!
1周期が400nsなので2.5MHz!
チョッ速になった。これでPICとの高速通信も問題なくできそう
もう少し何とかならないかと、探していたら
こんなHPを発見
http://d.hatena.ne.jp/naoya/20080122/1200960926
http://proger.blog10.fc2.com/blog-entry-64.html
なるほど合点です。4msより早くならない理由はusleepが原因でしたか。
早速、usleepを削除してみると、4msが1.3μsになりました!!
つまり1周期2.6μsだから384KHz
なので、8bit分送るのには18.4μs!
ざっくり16文字×2行の液晶に表示する場合は、 588μsこれなら全く問題にならないね!
ちなみに、ドライバー部分で無理やりループした場合は、
チョッ速になった。これでPICとの高速通信も問題なくできそう
2015年3月14日土曜日
FON2405EのGPIOの速度(すこし改善)
gpioコマンドを眺めていたら、
LED用のオプション「l」の他に
テストとして「w」があることにやっと気づいた。
そのままだと、1秒おきに1〜23までのGPIOの出力を変化させるだけなので、
少し変更して、特定のGPIOポートをパタパタさせるようにした。
user/rt2880_app/gpio内のgpio.c
gpio_test_write関数のgpio_write_initの後に
for(i=0; i< 1000; i++){
gpio_write_bit(11,0);
usleep(1);
gpio_write_bit(11,1);
usleep(1);
}
というのを挿入して、コンパイル。
/opt/buildroot-gcc342/bin/mipsel-linux-gcc \
-I/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/drivers/char \
-I/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/include \
-L/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/lib \
-o mygpio mygpio.c
そして、mygpio wを実行してみると

おぉ!ちょっと速くなった! 4ms!!
100msとか780msから比べると激速だね!
1つをクロックとして、もう1つをデータとした場合、
 下がクロック、上がデータ a(61h)をbit0から送った場合
下がクロック、上がデータ a(61h)をbit0から送った場合
クロックの立ち下がりで読み込んだとして、84msかかる。
ざっくり16文字×2行の液晶に表示する場合は、2.7秒近くかかることになるのか・・。
データを2ポートにすれば、 1.3秒くらい。
まだ遅いな。
クロックが一定であれば、UARTみたいにできるのだけど、
4msが8msになっている見えるところがある…。
さてどうしたものか
LED用のオプション「l」の他に
テストとして「w」があることにやっと気づいた。
そのままだと、1秒おきに1〜23までのGPIOの出力を変化させるだけなので、
少し変更して、特定のGPIOポートをパタパタさせるようにした。
user/rt2880_app/gpio内のgpio.c
gpio_test_write関数のgpio_write_initの後に
for(i=0; i< 1000; i++){
gpio_write_bit(11,0);
usleep(1);
gpio_write_bit(11,1);
usleep(1);
}
というのを挿入して、コンパイル。
/opt/buildroot-gcc342/bin/mipsel-linux-gcc \
-I/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/drivers/char \
-I/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/include \
-L/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/lib \
-o mygpio mygpio.c
そして、mygpio wを実行してみると
おぉ!ちょっと速くなった! 4ms!!
100msとか780msから比べると激速だね!
1つをクロックとして、もう1つをデータとした場合、
クロックの立ち下がりで読み込んだとして、84msかかる。
ざっくり16文字×2行の液晶に表示する場合は、2.7秒近くかかることになるのか・・。
データを2ポートにすれば、 1.3秒くらい。
まだ遅いな。
クロックが一定であれば、UARTみたいにできるのだけど、
4msが8msになっている見えるところがある…。
さてどうしたものか
2015年3月10日火曜日
busyboxでttyのボーレートを変更したい
FON2405EのシリアルコンソールttyS1のボーレートを57600から9600に変更したかった。
ググるとsttyを使って〜とあったので、sttyを含めた形でカーネル再構築。
sttyコマンドを使ってボーレートを指定しても変化なかった。
他のプロセスで使用していると変更できないらしい。
シリアルコンソールを一時的に止めてみるかと
inittabを変更
sdk3301/RT288x_SDK/source/venders/Ralink/RT3052/inittab
ここにttyS1::respawn:/bin/shというのがある。
しかしいきなり変えるのも怖いので、
ttyS1::askfirst:/sbin/getty 9600 ttyS1
とした。
別途gettyを含めて再構築。
結果・・・失敗です。なぜか57600で動きやがる。。。
ググるとsttyを使って〜とあったので、sttyを含めた形でカーネル再構築。
sttyコマンドを使ってボーレートを指定しても変化なかった。
他のプロセスで使用していると変更できないらしい。
シリアルコンソールを一時的に止めてみるかと
inittabを変更
sdk3301/RT288x_SDK/source/venders/Ralink/RT3052/inittab
ここにttyS1::respawn:/bin/shというのがある。
しかしいきなり変えるのも怖いので、
ttyS1::askfirst:/sbin/getty 9600 ttyS1
とした。
別途gettyを含めて再構築。
結果・・・失敗です。なぜか57600で動きやがる。。。
2015年3月2日月曜日
いろいろな進捗
なかなか最近意識が発散気味なのだけれど、
いくつかやることを絞っていきたいと思う。
1.FONなどRT305x搭載のルーターの使い道
勢いで入手したものもあり、現在4台。
何に使うか。
現状はキャラクタ液晶を接続できるように計画中。
複数台の並列プログラミングとかもやってみたい
2.7セグLED基板のファーム開発
I2C部分をまだ作っていない。
ラズベリーパイに接続するために、この部分を作ろう。
これは比較的早くできそう。
3.FPGAにオープンCPUコアを入れることをやってみたい
4.しりとりで用意したウィキペディアのデータを
他の用途でも使う。
5.SDRでなにかやる?
勢いで、DS-DT305を入手したけど・・・。
こんな感じだ。今月も頑張ろう。
いくつかやることを絞っていきたいと思う。
1.FONなどRT305x搭載のルーターの使い道
勢いで入手したものもあり、現在4台。
何に使うか。
現状はキャラクタ液晶を接続できるように計画中。
複数台の並列プログラミングとかもやってみたい
2.7セグLED基板のファーム開発
I2C部分をまだ作っていない。
ラズベリーパイに接続するために、この部分を作ろう。
これは比較的早くできそう。
3.FPGAにオープンCPUコアを入れることをやってみたい
4.しりとりで用意したウィキペディアのデータを
他の用途でも使う。
5.SDRでなにかやる?
勢いで、DS-DT305を入手したけど・・・。
こんな感じだ。今月も頑張ろう。
2015年2月22日日曜日
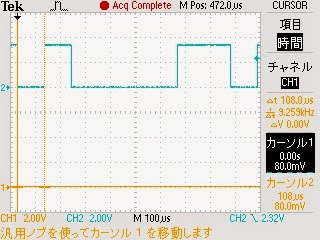
FON2405EのGPIOの速度
なんちゃってシリアル通信ができないか検討するなかで、
はたしてGPIOの速度はどのくらいなのかを調べたくなった。
まずは、ralinkのgpioコマンドの最小単位である100ms周期の点灯を
確認してみる。

ほとんど誤差なく100msだった。
すごいね。RT3050Fがすごいのか、使ったオシロの性能がアレなのか・・・。
次に、gpioコマンドでon-offを繰り返してみた。

うわー。遅い。遅すぎる。。。
780msって、これでデータを送ろうと思ったら、日が暮れてしまう。
なにか違う方法を考えなければ。
例えば、コンソール用のシリアル通信をなんとか使えないか考えよう。
と少し現実逃避して、久しぶりにPICマイコンで液晶表示をやってみた。

はたしてGPIOの速度はどのくらいなのかを調べたくなった。
まずは、ralinkのgpioコマンドの最小単位である100ms周期の点灯を
確認してみる。
ほとんど誤差なく100msだった。
すごいね。RT3050Fがすごいのか、使ったオシロの性能がアレなのか・・・。
次に、gpioコマンドでon-offを繰り返してみた。
うわー。遅い。遅すぎる。。。
780msって、これでデータを送ろうと思ったら、日が暮れてしまう。
なにか違う方法を考えなければ。
例えば、コンソール用のシリアル通信をなんとか使えないか考えよう。
と少し現実逃避して、久しぶりにPICマイコンで液晶表示をやってみた。
2015年2月16日月曜日
FON2405EのGPIOを使ってPICマイコンを操作する
少しづつ組み込みLinuxに慣れてきているような気がするけど、
まだまだやりたいことはある。
FONじゃないけど同じRT3050FのボードでUSBがあるものを使えるようにするとか。
一度にいろいろなことはできなので、少しづつ続けていこう。
土日で試したのは、
・OpwnWrtのビルド どうやって自分のボード用のファームを作成するのか
手順どおりにやると、欲しくもない違うボード用のファームが
たくさんできる・・・。1つでいいのよ。
・FON2405Eの追加書き換え 2台やって計3台 わーい!
・PICマイコンとの連携 GPIOを駆使してPICマイコンに接続
FONのGPIOのうち容易に取り出せるのは、
LED(GPIO11,12,14)そして、ボタン(GPIO10)の計4本
これだけあれば、なんちゃってシリアル通信ができそう。
そのための布石として、前にiModelaで基板から作った
7セグ表示マイコンを実験台にした。
http://continue-to-challenge.blogspot.jp/2014/12/imodelaeagle_13.html
そして、暫定で、
GPIO14 - RB4 カウントアップ・ダウン
GPIO11 - RB1 カウントスタート・ストップ
のように接続(したと思う)
操作系はこの前のWEBから〜を少し変えた。

FONは3.3VでPICは5Vで動かしているので、
FON→PICは大丈夫そうだけど、逆は配慮が必要。
今回は、FON→PICのみ
動かしているところはこんな感じ
まだまだやりたいことはある。
FONじゃないけど同じRT3050FのボードでUSBがあるものを使えるようにするとか。
一度にいろいろなことはできなので、少しづつ続けていこう。
土日で試したのは、
・OpwnWrtのビルド どうやって自分のボード用のファームを作成するのか
手順どおりにやると、欲しくもない違うボード用のファームが
たくさんできる・・・。1つでいいのよ。
・FON2405Eの追加書き換え 2台やって計3台 わーい!
・PICマイコンとの連携 GPIOを駆使してPICマイコンに接続
FONのGPIOのうち容易に取り出せるのは、
LED(GPIO11,12,14)そして、ボタン(GPIO10)の計4本
これだけあれば、なんちゃってシリアル通信ができそう。
そのための布石として、前にiModelaで基板から作った
7セグ表示マイコンを実験台にした。
http://continue-to-challenge.blogspot.jp/2014/12/imodelaeagle_13.html
そして、暫定で、
GPIO14 - RB4 カウントアップ・ダウン
GPIO11 - RB1 カウントスタート・ストップ
のように接続(したと思う)
操作系はこの前のWEBから〜を少し変えた。
FON→PICは大丈夫そうだけど、逆は配慮が必要。
今回は、FON→PICのみ
動かしているところはこんな感じ
2015年2月9日月曜日
FON2405EのLEDをWEBから制御する
やってみたかったことの1つ
web操作でFONのGPIOを制御すること。
ようやくできた。

制御方法はちょっとうさんくさいけど
Lighttpd+CGIで、gpioコマンドを叩いているだけ。。。
PHPとかPerlとかインストールしたいと思ったけど、
なにやらクロスコンパイルで挫折気味だったので、
CGIとしてシェルスクリプト(この場合何シェルっていうんだろう?bash?)を
持ちることにした。
Lighttpd.confに以下を追加・変更して
server.modules
= (
"mod_access",
"mod_cgi"
)
index-file.names
+= (
"index.xhtml",
"index.html", "index.htm", "default.htm",
"index.php","index.cgi"
)
cgi.assign
= (
".cgi"
=> ""
)
メインコンテンツとしてtest.cgiを作成する
#!/bin/sh
echo
"Content-type: text/html"
echo
NET_LED="OFF"
LAN_LED="OFF"
WPS_LED="OFF"
NET_LED=`echo
"$QUERY_STRING" | sed -n 's/^.*netled=\([^&]*\).*$/\1/p'
| sed "s/%20/ /g"`
LAN_LED=`echo
"$QUERY_STRING" | sed -n 's/^.*lanled=\([^&]*\).*$/\1/p'
| sed "s/%20/ /g"`
WPS_LED=`echo
"$QUERY_STRING" | sed -n 's/^.*wpsled=\([^&]*\).*$/\1/p'
| sed "s/%20/ /g"`
#
gpioname NET,LAN,WPS
#
mode off,on,fastbrink,slowbrink
echo
"<html><head><title>FON2405eのGPIOをWEBから操作する</title></head>"
echo
"<body>"
echo
"<h1>GPIOの制御(LEDの点消灯)</h1>"
echo
"<form method='get' action='test.cgi'>"
NET_LED_ON=""
NET_LED_FASTBRINK=""
NET_LED_SLOWBRINK=""
NET_LED_OFF=""
if
[ "$NET_LED" = "ON" ]; then
NET_LED_ON="checked"
gpio
l 12 0 1 0 0 0
elif
[ "$NET_LED" = "FASTBRINK" ]; then
NET_LED_FASTBRINK="checked"
gpio
l 12 1 1 4000 0 4000
elif
[ "$NET_LED" = "SLOWBRINK" ]; then
NET_LED_SLOWBRINK="checked"
gpio
l 12 5 5 4000 0 4000
else
NET_LED_OFF="checked"
gpio
l 12 1 0 0 0 0
fi
echo
"<p>NET-LED"
echo
"<input type='radio' name='netled' value='ON' $NET_LED_ON
>ON"
echo
"<input type='radio' name='netled' value='SLOWBRINK'
$NET_LED_SLOWBRINK >SlowBrink"
echo
"<input type='radio' name='netled' value='FASTBRINK'
$NET_LED_FASTBRINK >FastBrink"
echo
"<input type='radio' name='netled' value='OFF' $NET_LED_OFF
>OFF"
echo
"</p>"
LAN_LED_ON=""
LAN_LED_FASTBRINK=""
LAN_LED_SLOWBRINK=""
LAN_LED_OFF=""
if
[ "$LAN_LED" = "ON" ]; then
LAN_LED_ON="checked"
gpio
l 11 1 0 0 0 0
elif
[ "$LAN_LED" = "FASTBRINK" ]; then
LAN_LED_FASTBRINK="checked"
gpio
l 11 1 1 4000 0 4000
elif
[ "$LAN_LED" = "SLOWBRINK" ]; then
LAN_LED_SLOWBRINK="checked"
gpio
l 11 5 5 4000 0 4000
else
LAN_LED_OFF="checked"
gpio
l 11 0 1 0 0 0
fi
echo
"<p>LAN-LED"
echo
"<input type='radio' name='lanled' value='ON' $LAN_LED_ON
>ON"
echo
"<input type='radio' name='lanled' value='SLOWBRINK'
$LAN_LED_SLOWBRINK >SlowBrink"
echo
"<input type='radio' name='lanled' value='FASTBRINK'
$LAN_LED_FASTBRINK >FastBrink"
echo
"<input type='radio' name='lanled' value='OFF' $LAN_LED_OFF
>OFF"
echo
"</p>"
WPS_LED_ON=""
WPS_LED_FASTBRINK=""
WPS_LED_SLOWBRINK=""
WPS_LED_OFF=""
if
[ "$WPS_LED" = "ON" ]; then
WPS_LED_ON="checked"
gpio
l 14 1 0 0 0 0
elif
[ "$WPS_LED" = "FASTBRINK" ]; then
WPS_LED_FASTBRINK="checked"
gpio
l 14 1 1 4000 0 4000
elif
[ "$WPS_LED" = "SLOWBRINK" ]; then
WPS_LED_SLOWBRINK="checked"
gpio
l 14 5 5 4000 0 4000
else
WPS_LED_OFF="checked"
gpio
l 14 0 1 0 0 0
fi
echo
"<p>WPS-LED"
echo
"<input type='radio' name='wpsled' value='ON' $WPS_LED_ON
>ON"
echo
"<input type='radio' name='wpsled' value='SLOWBRINK'
$WPS_LED_SLOWBRINK >SlowBrink"
echo
"<input type='radio' name='wpsled' value='FASTBRINK'
$WPS_LED_FASTBRINK >FastBrink"
echo
"<input type='radio' name='wpsled' value='OFF' $WPS_LED_OFF
>OFF"
echo
"</p>"
echo
"<input type='submit' value='変更'>"
echo
"</form>"
echo
"</body></html>"
もうかっこ良くかけないものか。
でもシェルよくわかんないし、cgi作るもは初めてだし。。。
とりあえず、以下を参考にがんばった。
なんとか動くものになった。
2015年2月2日月曜日
FON2405EにLighttpdをインストールする
前回RalinkのSDKを使ってカスタムファームを導入してみた。
今回はいろいろなアプリケーションをインストールしてみようと思う。
その前に、毎回ファームを書き換えるのはめんどくさいので、NFSを使えるようにする
[Linux
Kernel Configuration]→[Networking]→[Networking options
--->]
→[]IP:Kernel level autoconfiguration


[Linux
Kernel Configuration]→[File systems]→[Network File Systems --->]
Provide
NFSv3とかチェック

[BusyBox
Configuration]→[Linux System Utilities]
[]
Support mounting NFS file systems

これで、
mount
-o nolock 10.10.10.3:/var/lib/tftpboot /mnt
とすれば、/mntに無限の可能性が広がるはず!
つぎに、webからGPIO制御したいなーという願望を持ちつつ、
SDKに付属のGOAHEADをさわろうとして、よくわからなくて。。。
Lighttpdをインストールしてみたいと思う。
1.ファームの再構築
pollってのが必要みたい
[Linux
Kernel Configuration]→[General setup]→[Configure standard kernel
feature]→[]Enable eventpoll supportにチェックを入れる
2.Lighttpdのクロスコンパイル
本体はここから取得。以下のようにしてクロスコンパイルを行う。
PATH="$PATH":/opt/buildroot-gcc342/bin
./configure
--host=mipsel-linux CC=/opt/buildroot-gcc342/bin/mipsel-linux-gcc
CFLAGS="-I/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/include"
LDFLAGS="-L/home/adeno/fongpio/sdk3301/RT288x_SDK/source/linux-2.6.21.x/lib"
--without-pcre --without-zlib --without-bzip2 –disable-ipv6
–prefix=/home/adeno/lighttpd
make
make
install
without系のオプションは、configureやmakeしたときにエラーになったものを除くため
(あとで、1つづつ検証していこう)
その結果できたものを
NFSのディレクトリに保存しておく
lighttpd
・lib
・sbin
・share
3.FON側からマウント
mount
-o nolock 10.10.10.3:/var/lib/tftpboot/ /mnt
そして、
mkdir
/usr/local
mkdir
/usr/local/lib
mount
-o nolock 10.10.10.3:/var/lib/tftpboot/lighttpd/lib /usr/local/lib
4.設定ファイルの準備
NFSディレクトリに以下を作成
・data/www/htdocs コンテンツ保存先
・data/www/log ログ保存先
lighttpd.confの作成
以下を参考に
server.event-handler
= "linux-sysepoll" をコメントアウトして
server.event-handler
= "poll" を追加する
あとは適当に・・・やって、/mnt/lighttpd.confに保存。
5.Lighttpd起動!
/mnt/lighttpd/sbin/lightpd
-D -f /mnt/lighttpd.conf
これで、10.10.10.254:4080にアクセスすると

やったー!
次はこの環境の永続化を考えよう。
2015年2月1日日曜日
GW-USMicroNとWLI-UC-GNをラズベリーパイで使う
この前、リサイクルショップで、GW-USMicroNが300円で売られていた。
小さくて可愛いのでついつい買ってしまった。
以前から持っているWLI-UC-GNと同じくらいの大きさ!
この大きさはラズベリー・パイに丁度いいと思い、早速接続ー

結論から書くと、2つとも同じドライバーで使えたのだ。
ベンダーIDとプロダクトIDは以下の通り。
GW-USMicroN は2019 ed14
WLI-UC-GNは0411 015d
一時的に使うのであれば、
恒久的に使うのであれば、
/etc/udev/rules.d/99-wireless.rules
/etc/modprobe.d/wireless.conf
やっぱり、ラズベリー・パイは情報が多くていいね!
小さくて可愛いのでついつい買ってしまった。
以前から持っているWLI-UC-GNと同じくらいの大きさ!
この大きさはラズベリー・パイに丁度いいと思い、早速接続ー
結論から書くと、2つとも同じドライバーで使えたのだ。
ベンダーIDとプロダクトIDは以下の通り。
GW-USMicroN は2019 ed14
WLI-UC-GNは0411 015d
一時的に使うのであれば、
modprobe
rt2800usb
echo
2019 ed14 > /sys/bus/usb/drivers/rt2800usb/new_id
恒久的に使うのであれば、
/etc/udev/rules.d/99-wireless.rules
#
PLANEX GW-USMicroN
ACTION=="add",
SUBSYSTEM=="usb", ATTR{idVendor}=="2019",
ATTR{idProduct}=="ed14", RUN+="/sbin/modprobe -qba
rt2800usb"
#
BUFFALO WLI-UC-GN
ACTION=="add",
SUBSYSTEM=="usb", ATTR{idVendor}=="0411",
ATTR{idProduct}=="015d", RUN+="/sbin/modprobe -qba
rt2800usb"
/etc/modprobe.d/wireless.conf
#
PLANEX GW-USMicroN
install
rt2800usb /sbin/modprobe --ignore-install rt2800usb $CMDLINE_OPTS;
/bin/echo "2019 ed14" >
/sys/bus/usb/drivers/rt2800usb/new_id
#
BUFFALO WLI-UC-GN
install
rt2800usb /sbin/modprobe --ignore-install rt2800usb $CMDLINE_OPTS;
/bin/echo "0411 015d" >
/sys/bus/usb/drivers/rt2800usb/new_id
やっぱり、ラズベリー・パイは情報が多くていいね!
----------------------------
ちなみに、前書いたGPIOの制御、ネットで調べたら使い方が書いてあった。
処理中(0.2s点灯、0.1s消灯を繰り返す)
gpio
l <gpio> 2 1 4000 0 4000
エラー(0.1s点灯、0.1s消灯を繰り返す)
gpio
l <gpio> 1 1 4000 0 4000
ふーん。使えるかも!
2015年1月27日火曜日
FON2405E カスタムファーム導入(ようやく成功2/2)
前回、menuconfigまで行けることを確認したので、
先駆者と全く同じではつまらないので、少しだけいじってみることした。
GPIOをいじってみたいので、その部分を有効に。
(しなくてもできるのかもしれないけどね)
Ralink
Linux SDK Configurationの
Main
Menu->Ralink Proprietary Applications->[]GPIOを選択しておく。
以下の動画2:30ぐらいのところ
そして、make V=99でファームを作成する!
出来上がったファームが2MB以下であれば、書き込みを行う。
書き込み方法は他でも紹介されているとおり。
リセットボタンを押しながら電源ON
ファームの書き換えが成功したら、ブラウザで10.10.10.254にアクセスして管理画面が表示される。そして、telnetもできる。
さて、お目当てのGPIOは、gpioというコマンドで制御できそう。
gpioの説明を見ると
The
GPIO testing user application is named gpio.
gpio
w: writing test (output)
gpio
r: reading test (input)
gpio
i (<gpio>): interrupt test for gpio number
gpio
l <gpio> <on> <off> <blinks> <rests>
<times>:
set
led on <gpio>(0~24) on/off interval, no. of blinking/resting
cycles, blinking time
とのこと。よくわからん。
とりあえず試してみると
gpio
l 14 1 0 0 0 0
でWPSランプが点灯した。
gpio
l 14 0 1 0 0 0
でWPSランプが消灯した。
この番号を総当りしたところ、
LANランプ(真ん中のやつ)は11
NETランプ(左のやつ)は12
であることがわかった。
NETランプだけ、点灯の論理が逆だった。
他の方の情報(https://awaitingstock.wordpress.com/2013/01/)だと、
電源緑 9
電源橙 12
無線 14
LAN 11
リセット 10
電源橙 12
無線 14
LAN 11
リセット 10
らしい。もしかしたら電源(NETランプ)はオレンジ色にも光るかもしれない。
これは楽しみ。
この3つのLEDでLチカしてみた。
あとは何をしようかな。
2015年1月24日土曜日
FON2405E カスタムファーム導入(ようやく成功1/2)

やっとカスタムファームを作成して書き込むことができた。
方法は、他の人がやっているようにRalink
SDKを使ったのだけれど、
今まで失敗していたので、考え方を変えて、ファームを作成するPCの環境(linuxのバージョン)を
このSDKと同じくらいの時期に出たものにすることにした。
仮想PCを用意すればものの10分で準備が終わる。便利なものだ。
用意したのは、
・VirtualBox
・MandrivaLinux2008(linux
2.6.22)
である。
ディストリビューションについては、どれでもいいと思うが、Mandrake→Mandriva→Mageiaと使ってきたので、思い出に浸るために選択。
実際の作業は、皆さんと同じ。今までの苦労は何だったんだ!というくらいに快適。
まずはmake menuconfig まで行けることの確認。
ここまで、5分くらいか。今までの苦労ななんだったんだ・・・。
さて、次はファーム作成して書き込むところをやってみる!
2015年1月18日日曜日
FON2405E カスタムファーム導入に挑戦!
年明けはいろいろと忙しく、なかなか更新ができなかった。

入手したFON2405Eにカスタムファームを導入するべく、いろいろ調査した。
FON2405E
OS OpenWRT(Linux2.6)
CPU
RT3050 320MHz
Memory
32MB
Flash 2MB
まず、有名な「Hot
Tuna Labs 」さんが公開しているカスタムファームを導入してみた。
これは手順どおりでいけた。ただし、bootメニューに入るのが苦労した。
10回挑戦して2回程度の成功率・・・。
このカスタムファームでGPIOを操作してみたかったのだが、
/dev/class/gpioがなくよくわからなかった。
/dev/gpioはあったのだが、
mkmodでなにかやるんか???
仕方がないので、カスタムファームを作成する方法を調査した。
(結果今のところ成功はしていない。。。Orz)
1.Ralink
SDK
Ralin
SDK
・Ralink_ApSoC_SDK_3600_20110715.tar.bz2
・Ralink_ApSoC_SDK_3301.tar.bz2
の2つで試してみる
1-1.Ralink_ApSoC_SDK_3600_20110715.tar.bz2
tar
xvjf Ralink_ApSoC_SDK_3600.tar.bz2
cd
RT288x_SDK/toolchain/
tar
xvjf buildroot-gcc342.tar.bz2
mv
buildroot-gcc342 /opt/.
cd
mksquash_lzma-3.2/
make
ここまでは、うまく行ったが、
/usr/bin/ld:
mksquashfs.o: シンボル 'log10@@GLIBC_2.0'
への未定義参照です
/lib/libm.so.6:
error adding symbols: DSO missing from command line
collect2:
エラー:
ld はステータス 1
で終了しました
Makefileに-lmが無いことが原因らしい
squashfs3.2-r2/squashfs-tools/Makefile
10行目
LDLIBS
+= -lz -L${LzmaAlone} -L${LzmaC}
LDLIBS
+= -lz -lm -L${LzmaAlone} -L${LzmaC}
mkdir
/opt/buildroot-gdb
mkdir
/opt/buildroot-gdb/bin
make
install
つぎに目的のsourceをと思ったが、
source内にMakefileがない。。。困った。
1-2.Ralink_ApSoC_SDK_3301.tar.bz2
3600と同じように
tar
xvjf Ralink_ApSoC_SDK_3301.tar.bz2
cd
RT288x_SDK/toolchain/
tar
xvjf buildroot-gcc342.tar.bz2
mv
buildroot-gcc342 /opt/.
cd
mksquash_lzma-3.2/
make
そして同じように
/usr/bin/ld:
mksquashfs.o: シンボル 'log10@@GLIBC_2.0'
への未定義参照です
/lib/libm.so.6:
error adding symbols: DSO missing from command line
collect2:
エラー:
ld はステータス 1
で終了しました
<builtin>:
recipe for target 'mksquashfs' failed
make[1]:
*** [mksquashfs] Error 1
squashfs3.2-r2/squashfs-tools/Makefile
10行目
LDLIBS
+= -lz -L${LzmaAlone} -L${LzmaC}
LDLIBS
+= -lz -lm -L${LzmaAlone} -L${LzmaC}
mkdir
/opt/buildroot-gdb
mkdir
/opt/buildroot-gdb/bin
make
install
これで、buildツールの準備ができたかな。
そして本体。
make
V=99
Makefile:319:
*** 暗黙ルールと通常ルールが混ざりました.
中止.
Makefileの319を書き換え
linux
linux%_only:
linux:
リトライ!!
make[3]:
Entering directory
'/home/adeno/fon/sdk3301/RT288x_SDK/source/user/busybox'
Makefile:1262:
*** 暗黙ルールと通常ルールが混ざりました.
中止.
中止!!
再度書き換え
vi
user/busybox/Makefile
/
%/: prepare scripts FORCE
/:
prepare scripts FORCE
リトライ!!!
make[1]:
Entering directory
'/home/adeno/fon/sdk3301/RT288x_SDK/source/vendors'
Makefile:28:
*** 暗黙ルールと通常ルールが混ざりました.
中止.
vi
vendors/Makefile
all
image clean romfs romfs.post vendor_%:
all
image clean romfs romfs.post:
まだぁ?
make[1]:
Entering directory
'/home/adeno/fon/sdk3301/RT288x_SDK/source/linux-2.6.21.x'
Makefile:1443:
*** 暗黙ルールと通常ルールが混ざりました.
中止.
vi
linux-2.6.21.x/Makefile
/
%/: prepare scripts FORCE
/:
prepare scripts FORCE
リトライしていくと…。
---
/Ralink/3301/sdk3301/RT288x_SDK/source/vendors/Ralink/RT3052/mkimage:
invalid entry point -n
/Ralink/3301/sdk3301/RT288x_SDK/source/vendors/Ralink/RT3052/./Makefile:80:
recipe for target 'image' failed
make[2]:
*** [image] Error 1
make[2]:
Leaving directory
'/Ralink/3301/sdk3301/RT288x_SDK/source/vendors/Ralink/RT3052'
Makefile:29:
recipe for target 'image' failed
make[1]:
*** [image] Error 2
make[1]:
Leaving directory '/Ralink/3301/sdk3301/RT288x_SDK/source/vendors'
Makefile:297:
recipe for target 'image' failed
make:
*** [image] Error 2
---
がぼー なんでかなぁ・・・・。
2.Openwrt(Image
Builder)
make
image PROFILE=Default
しばし待つと…
makeが終了したのだが、
2490372
1月 18
12:45
bin/ramips/openwrt-ramips-rt305x-rt-g32-b1-squashfs-sysupgrade.bin*
2.5MB
2MBにおさまってないやんOrz
3.Openwrt(Buildroot)
git
clone git://git.openwrt.org/openwrt.git
cd
openwrt
./scripts/feeds
update -a
./scripts/feeds
install -a
make
defconfig
make
prereq
make
menuconfig
Target
System はRalink
RT288x/RT3xxx
Subtarget
はRT3x5x/RT5350
based boards
を選択してmakeした
3~4時間待つと
2883588
1月
18
14:21
bin/ramips/openwrt-ramips-rt305x-esr-9753-squashfs-sysupgrade.bin
2.9MB 2MBにおさまってないやんOrz
--
うーん。 なかなか難しいね。
この1週間での進捗はこんな感じ。
登録:
投稿 (Atom)