前回、同期シリアル通信の下準備を行った。
汎用性とか考えると、やっぱりUART(調歩シリアル通信)をやってみたくなり、
ドライバ部分を書き換えてみた。
実験なので、通信速度は9600bpsで、パリティなし、ストップビットは1ビットとした。
やっていることは、結構単純で、1クロック分=1^6μs ÷9600=104μs分ごとにデータを出力するというもの。
http://www5b.biglobe.ne.jp/~kouta_y/news/newsvb/vb14.html
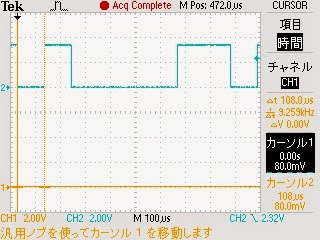
まず、比較のためにFT232RLにて'a'の1文字を送信した場合

これを目指して、作ってみよう。
linux-2.6.21.x/drivers/char/ralink_gpio.cに追記
80行目付近にある[int ralink_gpio_ioctl]のcase文に
case RALINK_GPIO_UART_SEND:
base_delay = 104;
c = (unsigned char)(arg & 0xFFl);
if (0L <= idx && idx < RALINK_GPIO_DATA_LEN) {
tmp =le32_to_cpu(*(volatile u32 *)(RALINK_REG_PIODATA));
//H
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
//start_bit(L)
tmp2 = tmp & ~(1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
//data loop
for(i=0; i<8; i++){
if((c & mask) > 0){
//h
tmp2 = tmp | (1L << idx);
}else{
//l
tmp2 = tmp & ~(1L << idx);
}
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay);
mask = mask <<1;
}
//stop bit
tmp2 = tmp | (1L << idx);
*(volatile u32 *)(RALINK_REG_PIODATA)= cpu_to_le32(tmp2);
udelay(base_delay*3);
}else
return -EINVAL;
break;
この結果が以下の通り
いざ受信させて見ると、10回に1回くらい取りこぼしてしまう。
(成功の場合)

(失敗の場合)

データの中間くらいが間延びしているように見える・・・。
なーぜーー
0 件のコメント:
コメントを投稿